



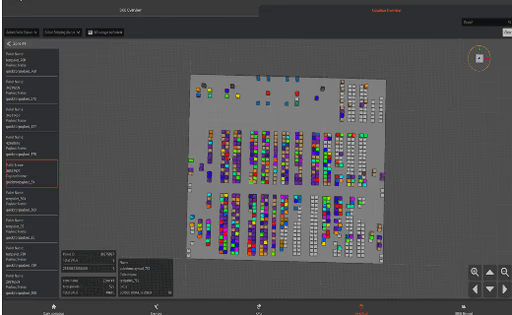
Perceive the Environment
MujinOS continuously maps the workspace using vision and sensors, keeping a real-time model of every asset and object

Uptime
Faster deployment
Compatible robot brands
Higher Throughput
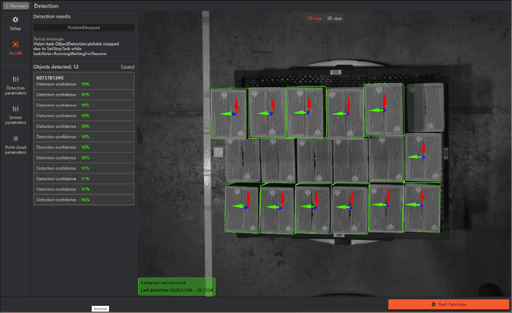
Computer Vision (Perception)
Easily integrate advanced vision to a system, with automatic SKU registration and real-time item detection
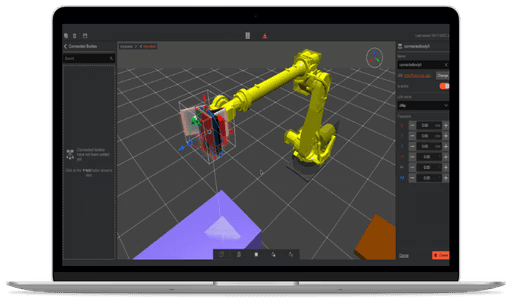
Motion Planning
Generate real-time, collision-free paths that optimize robot trajectories, creating organic movements that improve cycle time and uptime
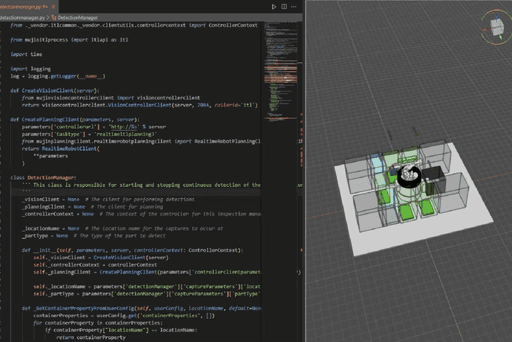
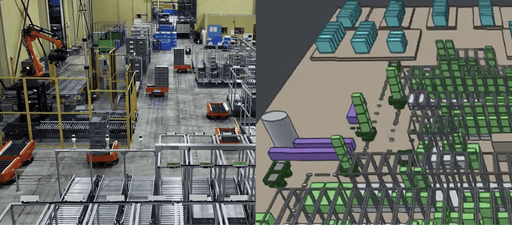
Digital Twin
Enable systems to be designed, tested, and optimized before production. Using the same real-time logic as the physical system, all motions, interactions, and goals behave exactly as planned.
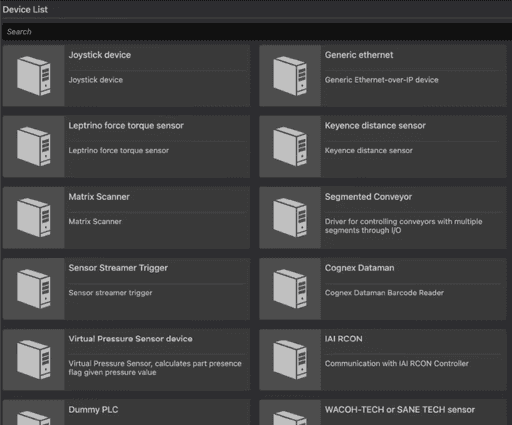
APIs & Interfaces
Seamlessly connect and control safety and I/O devices, MHE, and PLCs, feeding real-time data into the Digital Twin for intelligent operation
AGV Fleet Managment
Coordinate fleets of mobile robots with intelligent task management, enabling interoperability and maximizing efficiency
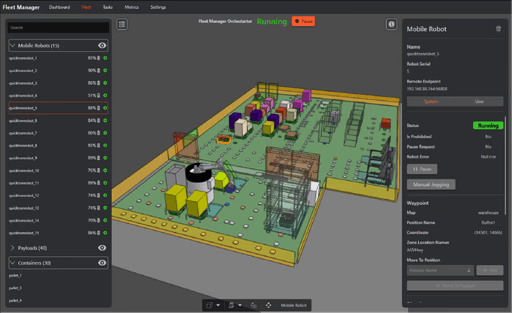
Execution System (Orchestration)
Orchestrate end-to-end order execution by integrating with any WMS and coordinating tasks across the entire system.
WebUI (Remote access)
The web-based UI enables secure remote access, real-time monitoring, and centralized orchestration of robots and AGVs from anywhere.
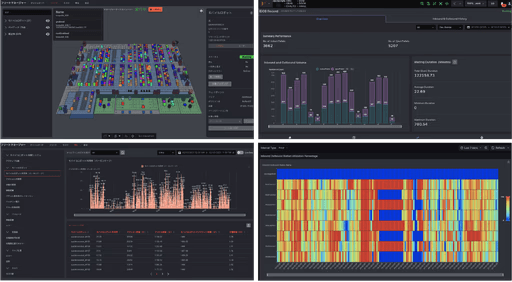
Unified UI/UX (dashboards)
A unified UI/UX standardizes how operators and supervisors interact with the entire robotics system, enabling faster adoption, fewer errors, and scalable operations.
Traditional Automation
Static infastructure
High capital expense
Long reprogramming cycles
Limited flexibility
Increased downtime risk
MujinOS Automation
Modular deployment
Low integration cost
Software-driven orchestration
Real-time adaptability
Continuous uptime
